TOBEX-CD. Третье перерождение Rug Warrior
14.05.2004
RoboJeep, напротив, разрабатывался с учетом устранения этих проблем. Там появилась вторая группа батарей для раздельного питания платы контролера и моторов, большие колеса и высокий клиренс, а скорость позволяла участвовать даже в ралли. Схема привода была стандартной- задние колеса ведущие, передние- поворотные. Из сенсоров активным стал лишь сонар, практически исключив собой остальные- сенсоры ИК и датчики освещенности.
К сожалению, такую конструкцию ожидал провал. Маневренность. Ее то как раз не стало. Радиус разворота составлял больше 1 метра, что абсолютно неприемлимо в условиях квартиры. Может где-то в поле еще ничего... В качестве ходовых двигателей были оставлены родные от радиоуправляемой игрушки. Да вот незадача- они очень высокооборотные и потребляют массу энергии. В итоге получилось, что с одной система управления двигателями жутко перегревалась через пару минут работы и происходил термальный шатдаун системы, батарей хватало на час с небольшим, а скорости были такие, что никакой сонар не успевал...
Зато я вдоволь потестировал работу сонара и научился исправлять некоторые его недостатки. Например, разрешающая способность. Угол (конус) распространения ультразвукового импульса сонара согласно документации составляет около 15 градусов. На деле эта величина оказалась минимум вдвое больше. В итоге, "увидеть" даже дверной проем с расстояния 2-3 метра не всегда представлялось возможным. Сам сонар был поднят на высоту 20 см от пола. Так вот, переодически происходило отражение сигнала даже от его поверхности! Короче, угол распространения волны необходимо было снижать, гадусов эдак до 10-15. Добился я этого с использованием бумажных конусов-насадок, то что иностранцы называют horn. Таким образом, теперь сканирование местности по фронту 180 градусов занимает у меня 30 импульсов с шагом 6 градусов.
Экспериментальным путем выяснилось, что минимальное время между импульсами должно быть не менее 0.3 сек. Таким образом, полное время сканирования составляет ~~10 сек, что немало!
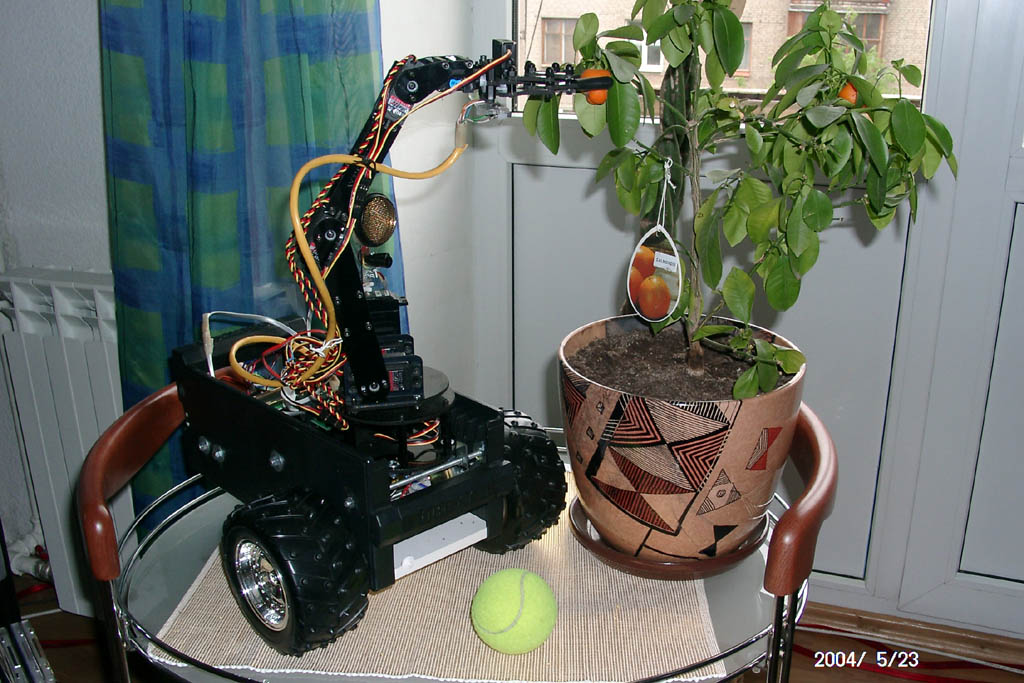 Проект TOBEX-CD призван устранить все технические проблемы на пути развития ИИ, а также задействовать манипулятор. Пока для чего он нужен не вполне понятно- будущее покажет. Новая конструкция (см рисунок ниже) использует проверенные двигатели с редуктором от Rug Warrior (96 об/мин) и качественные колеса диаметром 12.5 см, оба ведущие. Третье колесо- 5 см поворотный ролик на подшипнике. Длина тележки 30 см, ширина 14 см, высота от пола базы манипулятора- 23 см.
Проект TOBEX-CD призван устранить все технические проблемы на пути развития ИИ, а также задействовать манипулятор. Пока для чего он нужен не вполне понятно- будущее покажет. Новая конструкция (см рисунок ниже) использует проверенные двигатели с редуктором от Rug Warrior (96 об/мин) и качественные колеса диаметром 12.5 см, оба ведущие. Третье колесо- 5 см поворотный ролик на подшипнике. Длина тележки 30 см, ширина 14 см, высота от пола базы манипулятора- 23 см.
Итого, если поднять "руку" макисмально вверх, можно достать объект на высоте сантиметров 50! Внутреннего объема тележки достаточно, чтобы вместить 12 аккумуляторов типа "С" сумарной емкостью 7000 мАч, плату контроллера и солнечную батарею на 9В и макс током 200мА. По моим расчетам робот должен работать не менее 12 часов без подзарядки! Маневренность по первым тестам хорошая, проходимость (клиренс составляет 4.5 см) в норме, скорость- в самый раз. Может двигатели при такой массе нагрузке уже слабоваты, но это мелочи.
Среди сенсоров будут задействованы:
- сонар на поворотной платформе манипулятора плюс собственный шаговый мотор (360 градусов обзор!) на высоте 26 см,
- на нем же будет укреплен направленный фотосенсор с фокусирующей свет линзой,чтобы искать источник освещения по азимуту;
- фотосенсор общего (верхнего) освещения, в основном для определения времени суток;
- фронтальные ИК датчики для обнаружения препятствий слева и права по ходу движения на расстояниях менее 30 см;
- датчик частоты вращения колес для определения текущей скорости аппарата;
- микрофон
- три датчика касания. Скорее всего они будут задействованы в качестве кнопок управления и настройки робота;
- пара ИК датчиков, установленных непосредственно на "клешне" манипулятора для определения наличия объекта, который можно захватить;
- датчик уровня заряда батарей.
Как видим, количество сенсоров весьма достойное, а про количество задействованных двигателей я вообще не говорю- аж 10 штук! Особо хочу остановиться на манипуляторе. Он имеет 6 степеней свободы и сделан из легких материалов с использованием шаговых моторов с редукторами. Реакции на позиционирование каждой ступени весьма точны и быстры, а "сила" руки вполне способна работать с объектами в 500 грамм веса! Собрать ее оказалось делом простым и заняло пару вечеров. Очень полезным стал контроллер моторов SSC-12. Он может управлять до 12-ти моторов одновременно и совсем не греется. Странно! Греются моторчики, но не сам контроллер! Для "руки" задействованно только 6 портов. Так что остальные можно использовать для всяческих других функций. Правда подозреваю, что этот манипулятор энергию жрет, как паровоз... По крайней мере на его блоке питания написано: Output 6V, 2A !!!
Управляется манипулятор через встроенный RS-232 порт посылкой определенной последовательности команд. С компьютером проблем особых не было (в комплекте идет софт под Windows- такая дрянь!). А вот совместить главный контролер робота с SSC-12 оказалось ой как нелегко. Долго порывшись в Интернете (все таки славная эта штука- интернет!!!) я нашел недокументированные функции BIOS по посылке и получения данных из RS-232 порта. Кроме того, пришлось спаять особый коммуникационный кабель. Кому интересно- спрашивайте, обязательно расскажу.
Короче, техническая часть оказалось непростая, но с массой возможностей. "А почему все-таки TOBEX-CD?"- спросите Вы. Все очень просто- так называлась коробочка для хранения компакт дисков, из которой родился корпус нового робота. Да и первая команда голосом готова, типа: "Тобекс, падла, сиди! Кому сказал..."
Продолжение следует...